An open-source robot project
GOAL
Design an in/outdoor mobile manipulating robot capable of autonomous navigation with the ability to pick up small items. Precision/repeatability should be comparable to industrial robotics. Joint torque sensing to maintain human safety, and used to protect the robot for collisions.
Demonstrate best practices for robot prototyping. Design using obtainable parts and manufacturing tolerances. Design to be assembled by a person of average skill.
Robot project is open source such that robotics engineers can use, modify, and contribute as desired. Extra space is provided in the through bore in the arm to enable running some cables with clean wire routing.
Why?
Our group currently consists of 4 highly experienced electrical/mechanical/controls engineers that have been working on robotic hardware for 10's of years.
We've found that robotic hardware requires either significant experience or significant time and iterations to design, tolerance, and control robotic hardware. We've also noticed that there is significant interest in the areas of non-industrial robotics but many groups have difficulty with implementation of the hardware.
Difficulty with hardware slows progress and can lead to misleading results when implementing higher-level control and AI. At the same time, many groups have an interest in design ownership and are not interested in purchasing a platform over which they have little control. With this project, we wish to make our hardware and control experience available at no cost in order to help as much as possible growth in robotics.
Design targets
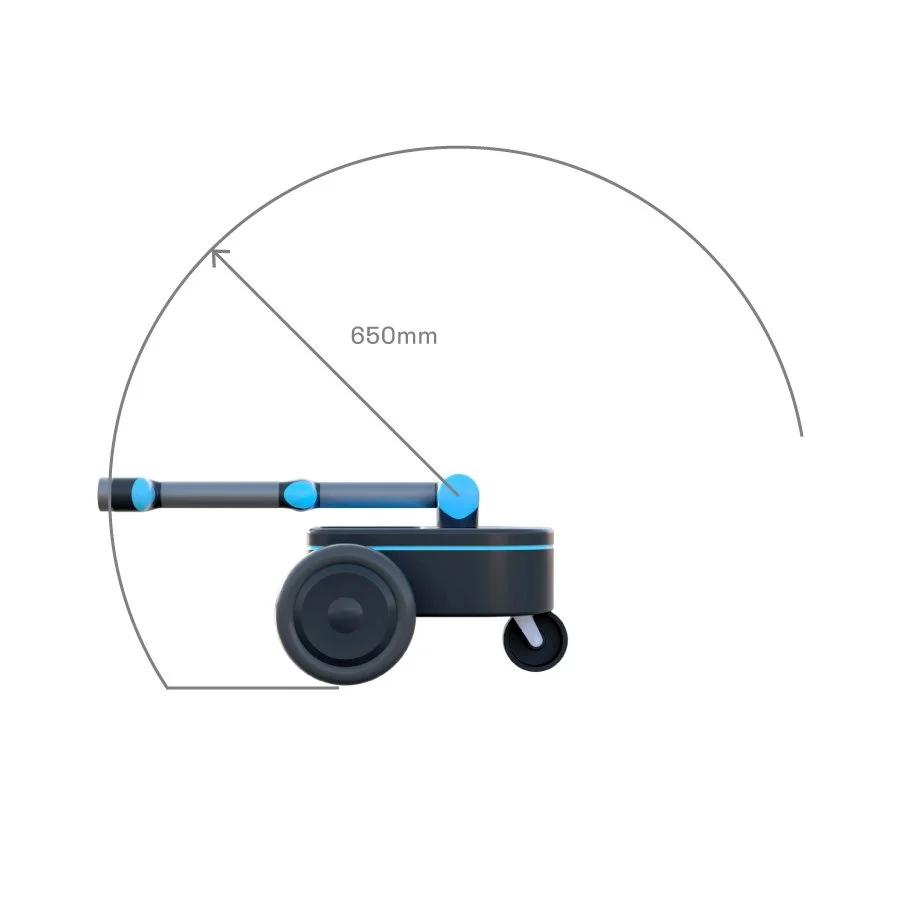
Traditional mobile robot approach with a heavy base and precision arm
20 kg total weight
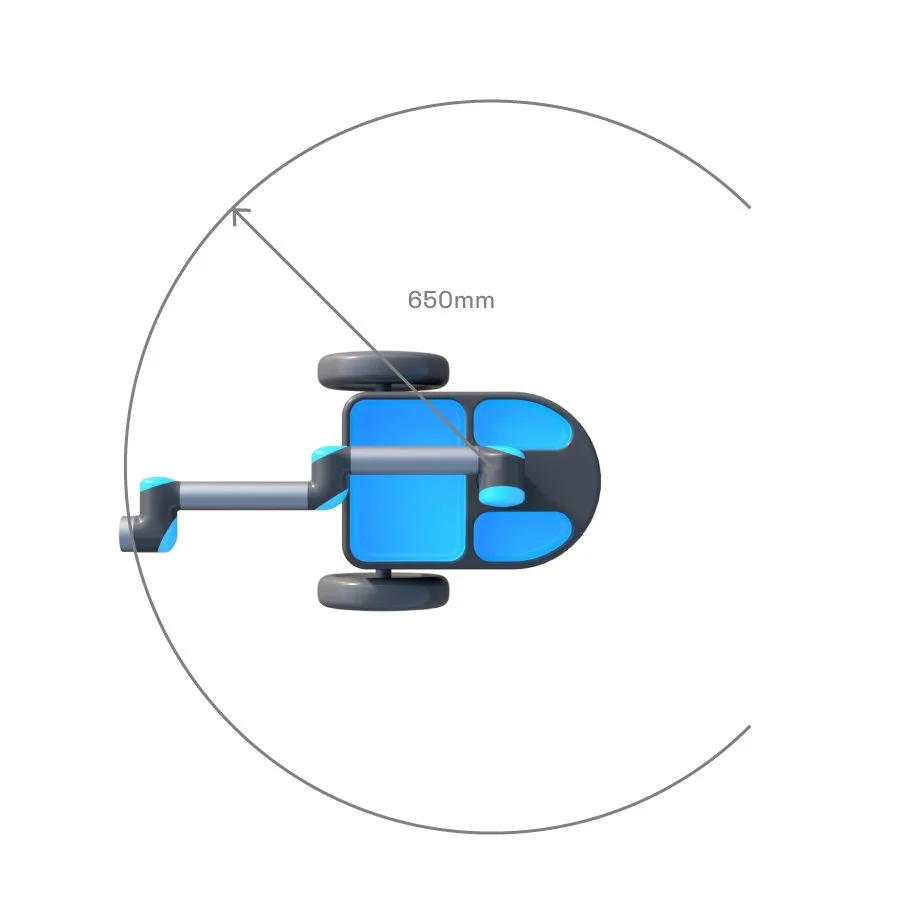
Two-wheel plus caster base.
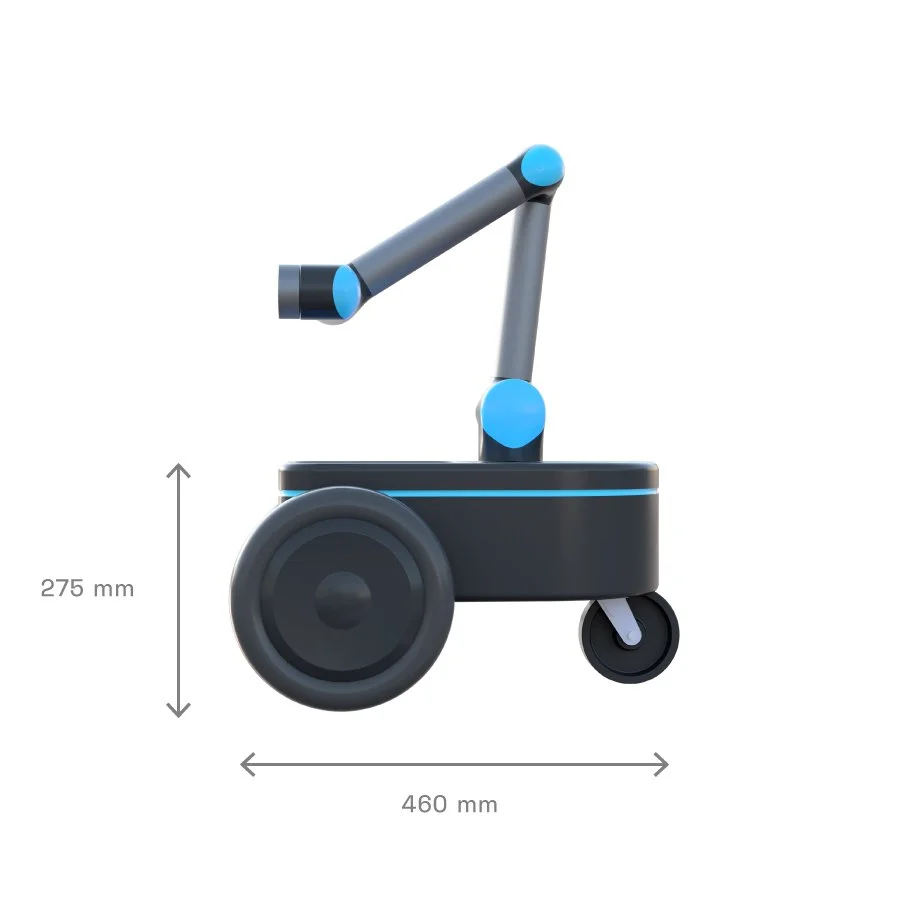
5 DOF Manipulating arm for grasping and other tasks
Pan, pitch, pitch, pitch, roll joint configuration
Joint torque sensing
Bin on robot for storing and transporting items
Wrist has offset roll inline with pitch to maintain close grip to wrist pitch
Grip options for different applications - parallel jaw, vacuum cup, spike, actuated spike, electrostatic, soft gripper
The arm payload supports a 500 g gripper plus 10N peak forces
Base and wrist cameras