
resources
Mechanical
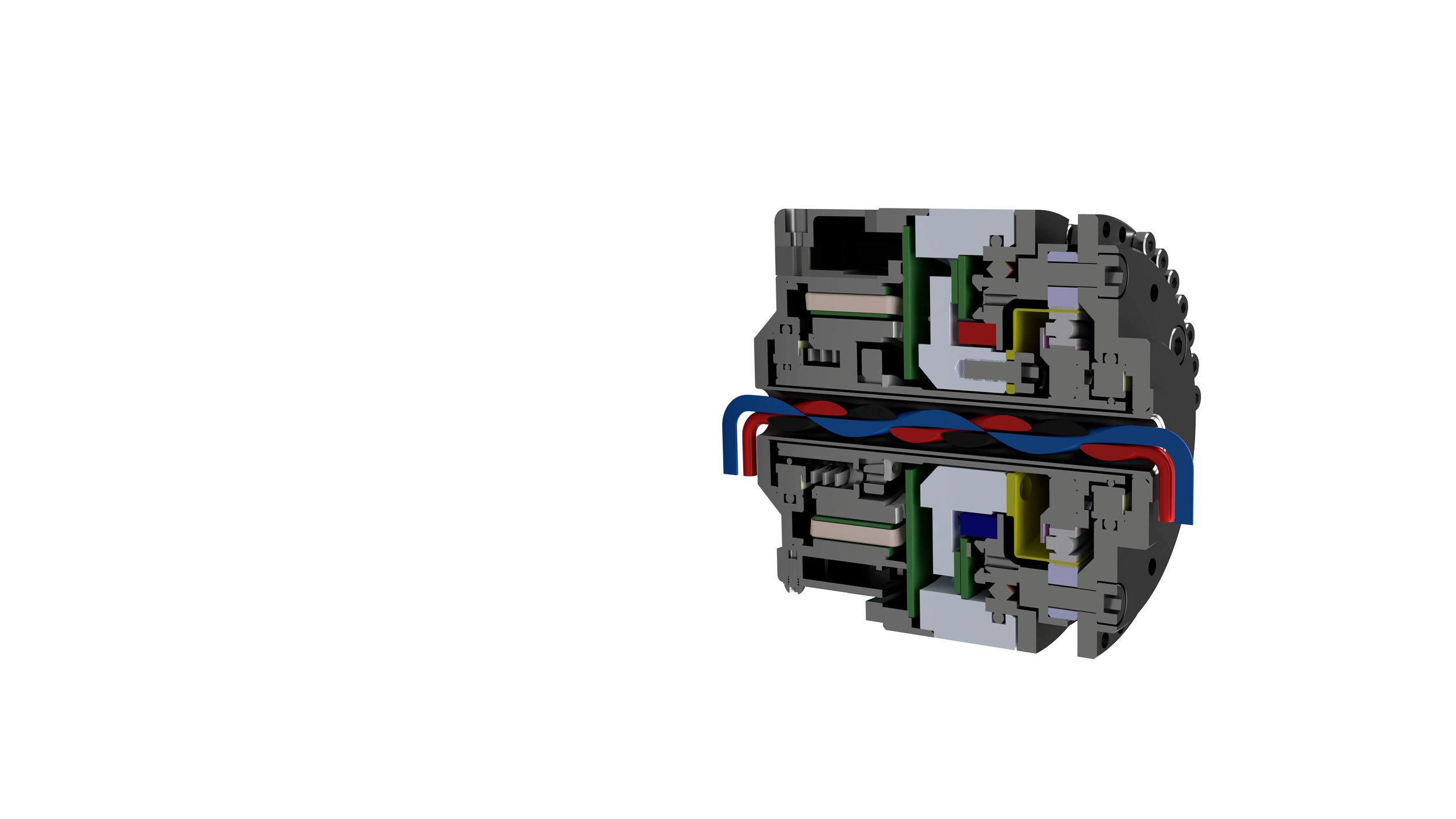
The mechanical hardware will be designed in SolidWorks and distributions will be available through Google Drive. In addition, the Autodesk® Fusion 360 viewer is helpful for quick online viewing. Here is a sample of the robot shell: a360.co/3g13j6e. Note that this is just an early stage sketch, not detailed. Here is a sample of the wrist/elbow actuator: a360.co/2zX72ln. As of 12/2022, we’re working on a second iteration of the small actuator and experimenting with cost vs. tolerance trade-offs.
Software
Software and motor control firmware is maintained on github. The starting place for a full install is: github.com/unhuman-io/obot